
The FES Rowing project was a research group at Cal Poly (pictured below) focused on modeling the effects of functional electrical stimulation (FES) rowing on patients undergoing physical therapy from spinal cord injuries (SCI’s). My primary focus on this research team was creating a 2D kinematic and kinetic model to be able to quickly and accurately predict joint reaction forces and moments with a few basic inputs.

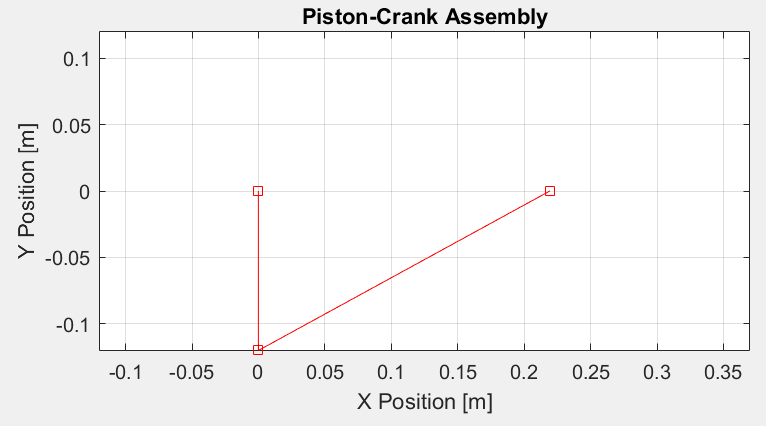
In my introduction to MATLAB course, I had a great professor named Chris D’Elia. He was a MATLAB whiz and was able to explain the concepts to our class flawlessly. Even though this was my first programming class ever, Chris made the material seem intuitive and easy to understand. I have a feeling it was a testament to his mastery of the material. One of the most applicable skills he taught us was creating linkage model animations for visualizing and analyzing the complex or irregular motion of components within a system. The system we chose as an example was a basic piston-crank assembly, the motion of which is pivotal to the operation of combustion engines. Below are some images for the animation, showing the model at each quarter turn.
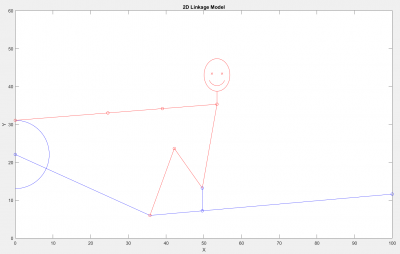
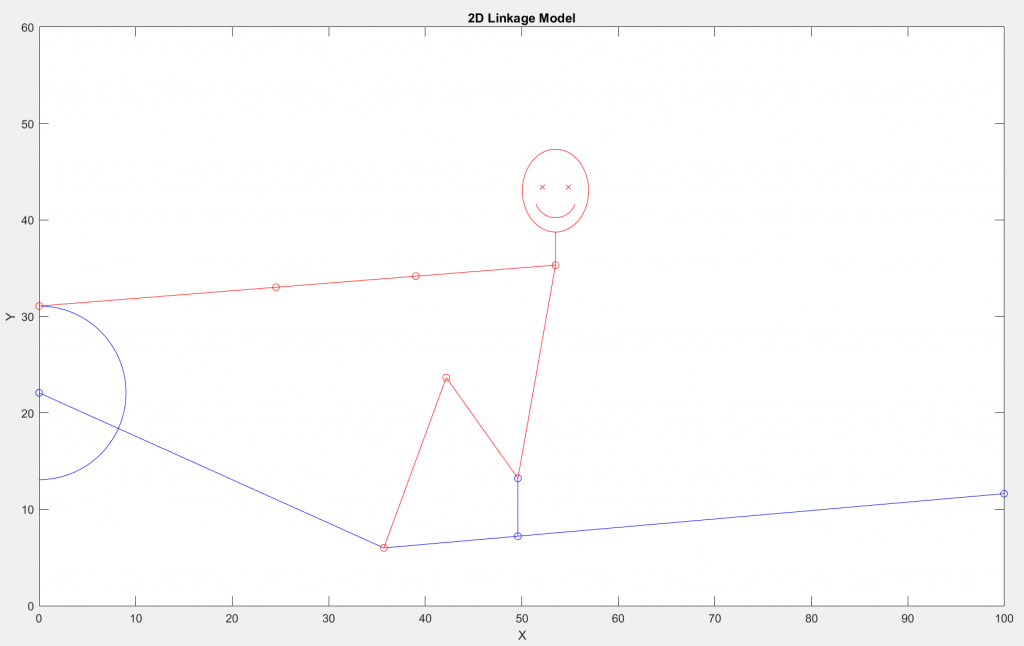
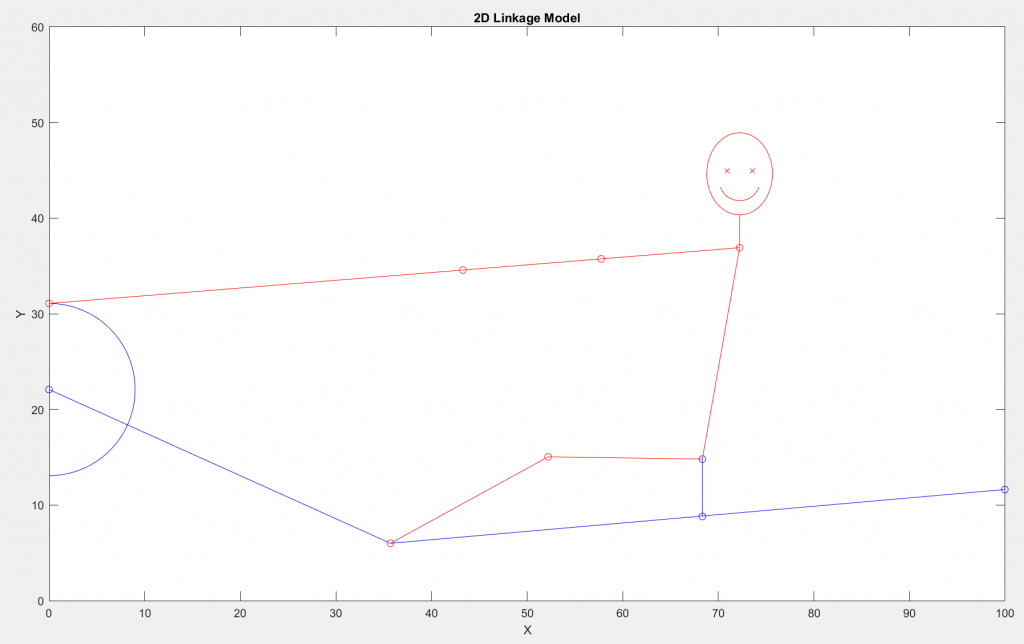
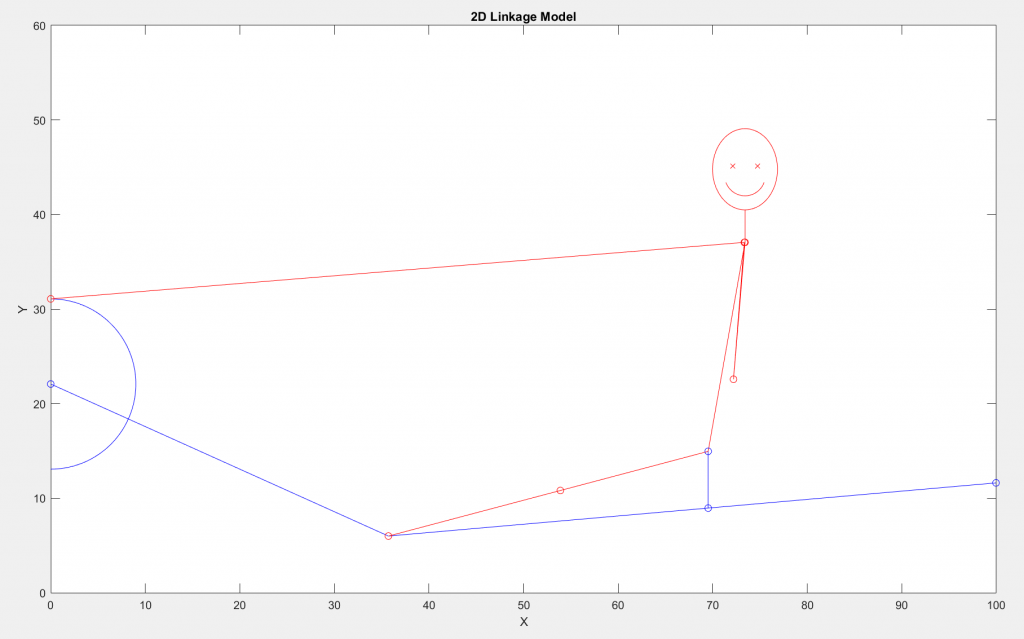
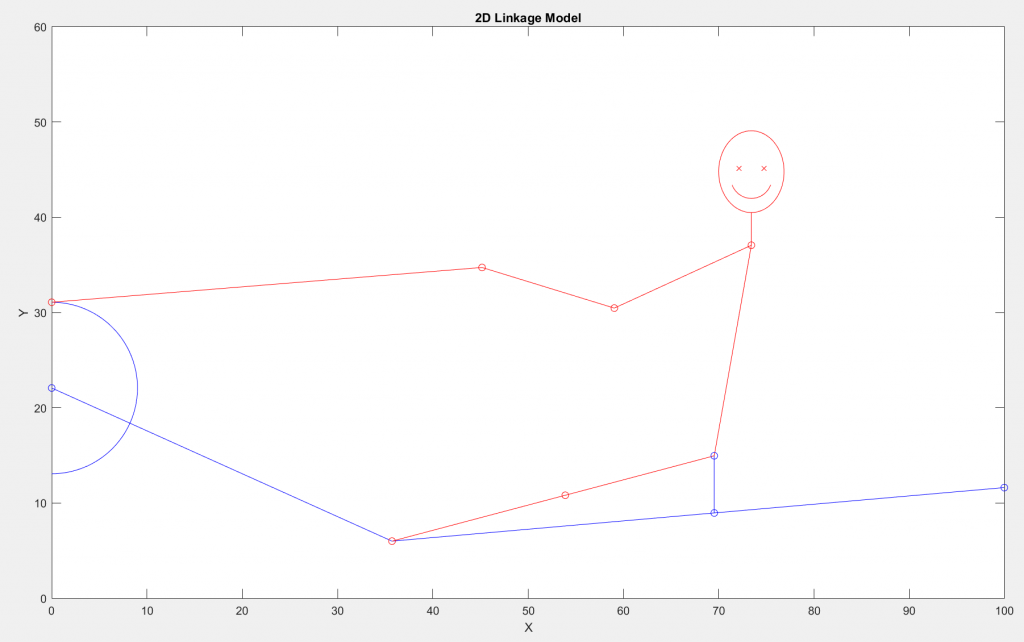
Using the knowledge I gained from this course, my partner Griffin Paul and I were able to develop a 2-D kinematic model of a person using a stationary rower. The model involved >500 lines of code and went through several iterations and analyses. The below screenshots show each position of the rower within the rowing cycle.
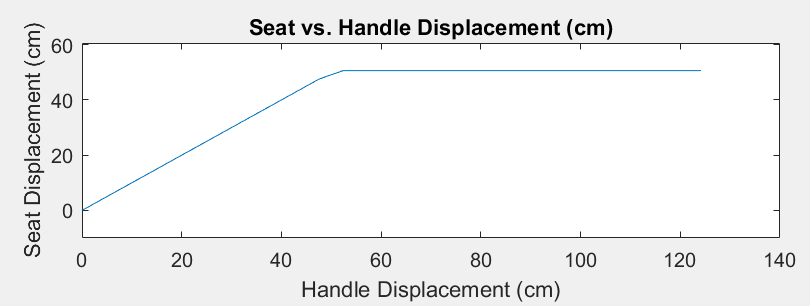
Several plots were generated to compare to literature including seat vs. handle displacement, seat and handle position over time, femur angle over time, and knee angle over time. This study found differences in the motion of an SCI patient compared to a healthy rower. (NR = healthy, PV1 and PV2 = SCI patients; validation model courtesy of Davoodi and colleagues).
2D Matlab Model
Validation Model

Seat vs. Handle Displacement
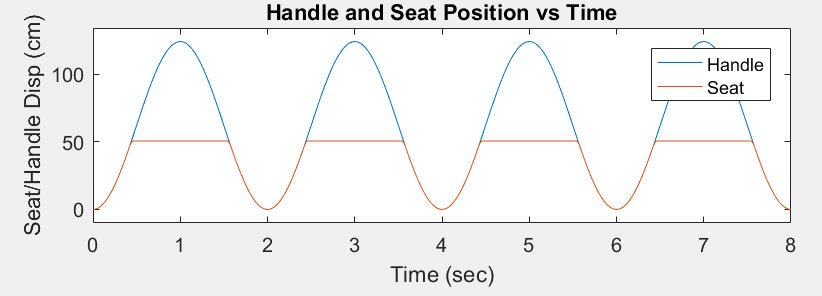



Handle and Seat Position vs. Time
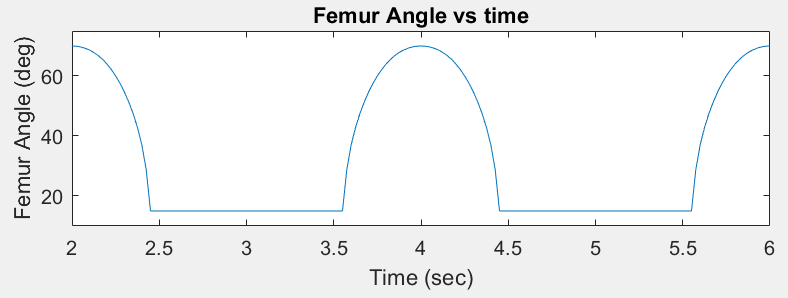

Femur Angle vs. Time
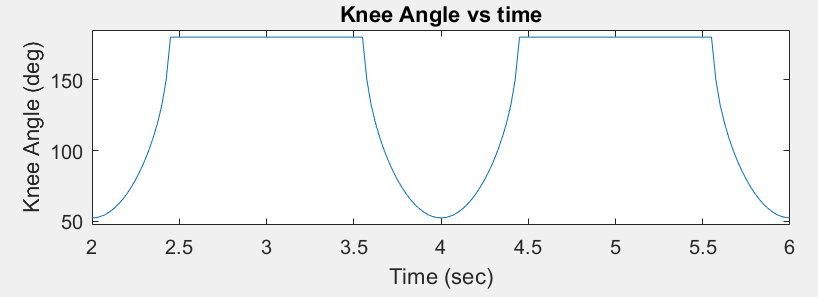

Knee Angle vs. Time
Unfortunately, the project was cut somewhat short because the professor that led our lab transferred to the New Jersey Institute of Technology. The model proved to be a fairly accurate predictor of motion, however it required further refinement to become an accurate predictor of joint reaction forces and moments. Due to the mechanical constraints of the system, some assumptions needed to be made that caused jumpiness, which translated to spikes in the accelerations and therefore in forces and moments that were dependent on the time step. Additionally, constraining the motion to two dimensions created some complications for modeling the motion of the elbows, as can be seen in Position 3. Before our professor left, we had planned a few next steps in the project including refining the elbow motion to better approximate actual motion, smoothing out some of the jumpiness, studying the effect of stroke rate on knee reaction forces, adding a “skill level” to study how rowing technique impacts reactions forces, and writing an abstract for a publication.
This project was a great introduction to research and working with a team on a technical project. Although we did not end up publishing, I think the FES rowing project was a valuable experience that shaped the way I work and taught me some valuable lessons in technical expertise, project management, and people skills that I still carry with me today.
The group also offered some decent exposure to exercise equipment manufacturing. Here I am pictured with another group member and a director at Keiser Corporation where we toured and demoed some of their pneumatic resistance equipment, designed for a better workout due to eliminating the effects of momentum associated with classic iron weights. Gabe is demoing a hand cycle designed for individuals in wheelchairs.
